Adaptive brain-like neural networks for control of robotic limbs in brain-inspired hardware- MSc Thesis project
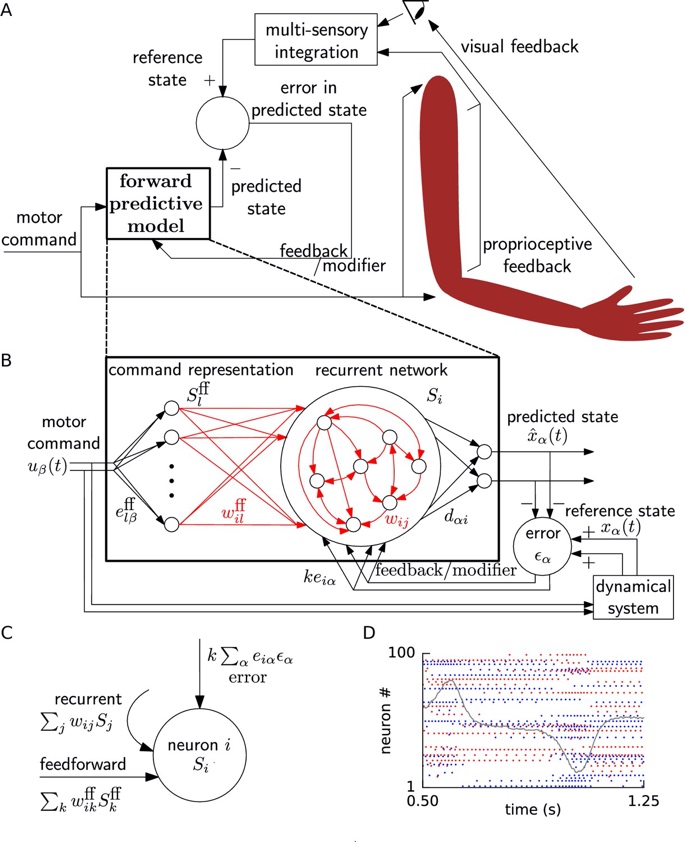
Figure 1: Schematic for learning a forward model. [3]
The Institute of Neuroinformatics (INI) is a joint institute of the University of Zurich and the Swiss Federal Institute of Zurich (ETH Zurich). INI carries out experimental, theoretical and applied research with the aim of discovering key principles by which the brain is built and works and using this knowledge in practical applications where possible. The Neuromorphic Cognitive Systems (NCS) group at INI has been developing neuromorphic processing platforms that enable event-driven computing using algorithms and primitives inspired by biology.
The cerebellum is a hind-brain area that contains more than half of the brain's neurons. It has been implicated as one of the brain areas controlling body movements, especially for learning body models and rapidly adapting to changes in body dynamics. Inspired by this role, various groups have developed (spiking) neural network models of movement control involving the cerebellum [1,2,3,4]. Apart from learning how the brain controls movement, such models may be useful for energy-efficient neuromorphic [5] and neurorobotic [6] applications.
In this project, you will implement/port these spiking neural network models to a simulator, that is suitable for neuromorphic applications, e.g. Brian2. The relative performance of these algorithms in movement control of a robotic limb model will be benchmarked in simulation, and their suitability for neuromorphic deployment will be studied.
Reference:
[1] Luque, Niceto R., Jesús A. Garrido, Francisco Naveros, Richard R. Carrillo, Egidio D’Angelo, and Eduardo Ros. ‘Distributed Cerebellar Motor Learning: A Spike-Timing-Dependent Plasticity Model’. Frontiers in Computational Neuroscience 10 (2016).
https://doi.org/10.3389/fncom.2016.00017.
[2] Abadía, Ignacio, Francisco Naveros, Jesús A. Garrido, Eduardo Ros, and Niceto R. Luque. ‘On Robot Compliance: A Cerebellar Control Approach’. IEEE Transactions on Cybernetics, 2019, 1–14.
https://doi.org/10.1109/TCYB.2019.2945498.
[3] Gilra, Aditya, and Wulfram Gerstner. ‘Predicting Non-Linear Dynamics by Stable Local Learning in a Recurrent Spiking Neural Network’. ELife 6 (27 November 2017): e28295.
https://doi.org/10.7554/eLife.28295.
[4] Porrill, John, Paul Dean, and Sean R. Anderson. ‘Adaptive Filters and Internal Models: Multilevel Description of Cerebellar Function’. Neural Networks, Computation in the Cerebellum, 47 (1 November 2013): 134–49.
https://doi.org/10.1016/j.neunet.2012.12.005.
[5] Thakur, Chetan Singh, Jamal Lottier Molin, Gert Cauwenberghs, Giacomo Indiveri, Kundan Kumar, Ning Qiao, Johannes Schemmel, et al. ‘Large-Scale Neuromorphic Spiking Array Processors: A Quest to Mimic the Brain’. Frontiers in Neuroscience 12 (2018).
https://doi.org/10.3389/fnins.2018.00891.
[6] Krichmar, Jeffrey L. ‘Neurorobotics—A Thriving Community and a Promising Pathway Toward Intelligent Cognitive Robots’. Frontiers in Neurorobotics 12 (2018).
https://doi.org/10.3389/fnbot.2018.00042.
Requirements
Programming skills in Python,
Interest in neuronal systems (biological or artificial).
Contact
Giacomo Indiveri: giacomo (at) ini.uzh.ch