Master thesis - Controller for transcutaneous electrical nerve stimulation (TENS) to non-invasively provide tactile sensory feedback for amputees (collaboration with Johns Hopkins University)
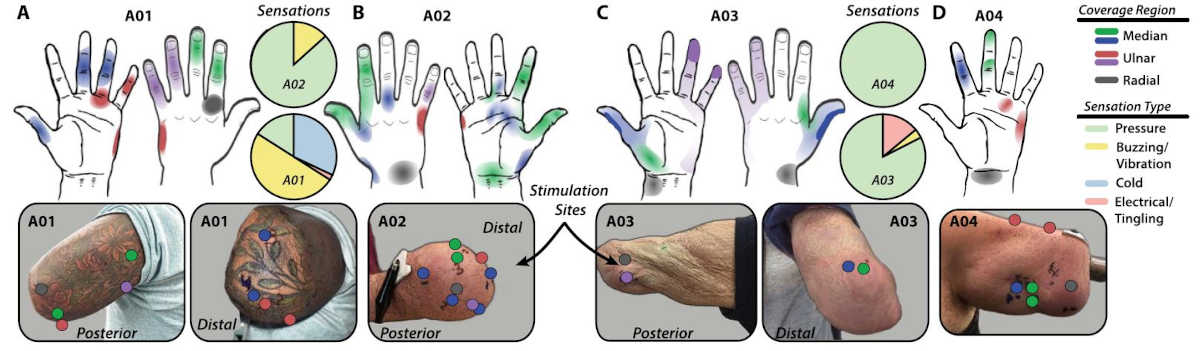
Figure Example sensory maps of amputees using TENS [12].
Background
Active touch sensing is a critical information-seeking sensory system used to learn about and explore a person’s environment and to control ongoing behavior. Consequently, restoring tactile sensory perception is an important goal of upper limb prosthesis development to improve functionality. To achieve this, electronic skins with artificial tactile sensing capabilities are integrated with prostheses to gather information about the environment. The tactile information is then fed back to the user so that they can be aware of their environment and respond appropriately. For prosthesis users, tactile feedback can be accomplished through invasive electrical stimulation of the brain ([1], [2], [3]), invasive stimulation of the peripheral nerves ([4], [5], [6], [7], [8], [9]), or non-invasive stimulation of the peripheral nerves ([10], [11], [12], [13]). This project will focus on non-invasive transcutaneous electrical nerve stimulation (TENS) (as in Fig. 1).
To provide sensory feedback to an amputee, sensory mapping must be conducted to explore the available phantom limb sensations that can be elicited. This must be done empirically as amputee physiology varies widely and the peripheral nerves reinnervate or die randomly after amputation. The stimulation takes the form of electrical pulses. By varying the shape, amplitude, frequency, and pulse-width, the user will perceive differences in sensation naturalness, intensity, and specificity [4], [5], [6], [7]. Recent studies have shown that multiple stimulation channels can be used to create sensations of motion, edges, or slippage [3], [8], [11].
Project Objectives
-
- HW/SW Platform to flexibly generate a wide range of TENS patterns
-
- - A Digitimer DS8R TENS unit and D188 Electrode selector have already been procured
-
- - Develop an interface with the DS8R and D188 to program the stimulation parameters (stimulation time, frequency, pulse width, amplitude, interphase-interval, etc…) for multiple output channels
-
- Conduct psychophysics experiments with able-bodied subjects to tune stimulation parameters for intended tactile perception
-
- Try functional tasks with and without sensory feedback to demonstrate the utility of feedback
The group at JHU has done some preliminary work developing the HW/SW platform and has experience with psychophysics experiments. The plan is to pool effort/resources to create a tool that will be helpful for both groups.
Requirements
Python programming, familiarity with basic HW/microcontrollers, MATLAB familiarity (prior codebase to be ported into Python), interest in working with human subjects for psychophysics experiments.
Contacts
Mark Iskarous (mark.iskarous@gmail.com), Elisa Donati (elisa@ini.uzh.ch), Catherine Ding (kding3@jhu.edu
References
[1] S. N. Flesher et al., “Intracortical microstimulation of human somatosensory cortex,” Science Translational Medicine, vol. 8, no. 361, pp. 361ra141-361ra141, Oct. 2016, doi: 10.1126/scitranslmed.aaf8083.
[2] M. S. Fifer et al., “Intracortical Somatosensory Stimulation to Elicit Fingertip Sensations in an Individual With Spinal Cord Injury,” Neurology, vol. 98, no. 7, pp. e679–e687, Feb. 2022, doi: 10.1212/WNL.0000000000013173.
[3] G. Valle et al., “Tactile Edges and Motion Via Patterned Microstimulation of the Human Cortex,” May 07, 2024, medRxiv. doi: 10.1101/2024.05.06.24306627.
[4] G. Valle et al., “Biomimetic Intraneural Sensory Feedback Enhances Sensation Naturalness, Tactile Sensitivity, and Manual Dexterity in a Bidirectional Prosthesis,” Neuron, vol. 100, no. 1, pp. 37-45.e7, Oct. 2018, doi: 10.1016/j.neuron.2018.08.033.
[5] G. Valle et al., “Comparison of linear frequency and amplitude modulation for intraneural sensory feedback in bidirectional hand prostheses,” Sci Rep, vol. 8, no. 1, Art. no. 1, Nov. 2018, doi: 10.1038/s41598-018-34910-w.
[6] E. L. Graczyk, M. A. Schiefer, H. P. Saal, B. P. Delhaye, S. J. Bensmaia, and D. J. Tyler, “The neural basis of perceived intensity in natural and artificial touch,” Science Translational Medicine, vol. 8, no. 362, pp. 362ra142-362ra142, Oct. 2016, doi: 10.1126/scitranslmed.aaf5187.
[7] E. L. Graczyk, B. P. Christie, Q. He, D. J. Tyler, and S. J. Bensmaia, “Frequency Shapes the Quality of Tactile Percepts Evoked through Electrical Stimulation of the Nerves,” J. Neurosci., vol. 42, no. 10, pp. 2052–2064, Mar. 2022, doi: 10.1523/JNEUROSCI.1494-21.2021.
[8] L. Zollo et al., “Restoring tactile sensations via neural interfaces for real-time force-and-slippage closed-loop control of bionic hands,” Science Robotics, vol. 4, no. 27, p. eaau9924, Feb. 2019, doi: 10.1126/scirobotics.aau9924.
[9] J. A. George et al., “Biomimetic sensory feedback through peripheral nerve stimulation improves dexterous use of a bionic hand,” Science Robotics, vol. 4, no. 32, p. eaax2352, Jul. 2019, doi: 10.1126/scirobotics.aax2352.
[10] L. Osborn et al., “Targeted transcutaneous electrical nerve stimulation for phantom limb sensory feedback,” in 2017 IEEE Biomedical Circuits and Systems Conference (BioCAS), Turin, Italy: IEEE, Oct. 2017, pp. 1–4. doi: 10.1109/BIOCAS.2017.8325200.
[11] A. Scarpelli et al., “Eliciting force and slippage in upper limb amputees through Transcutaneous Electrical Nerve Stimulation (TENS),” IEEE Transactions on Neural Systems and Rehabilitation Engineering, pp. 1–1, 2024, doi: 10.1109/TNSRE.2024.3443398.
[12] L. E. Osborn et al., “Sensory stimulation enhances phantom limb perception and movement decoding,” J. Neural Eng., vol. 17, no. 5, p. 056006, Oct. 2020, doi: 10.1088/1741-2552/abb861.
[13] E. D’Anna et al., “A somatotopic bidirectional hand prosthesis with transcutaneous electrical nerve stimulation based sensory feedback,” Sci Rep, vol. 7, no. 1, Art. no. 1, Sep. 2017, doi: 10.1038/s41598-017-11306-w.